什么是四叉树? 如图,设想, 红框表示地图,星星表示单位,黄框表现范围, 要处理地图中范围内的单位,最直接的做法是筛选所有单位。 通过上图可以看到一个显而易见的问题,大部分单位都不需要被处理。 如果把地图...
”const rect 四叉树 源码“ 的搜索结果
四叉树与引擎内置碰撞检测的结合运用。完整项目见文末。效果预览绿色为参加检测的对象(当前四叉树节点),红色为碰撞对象。如何使用引入脚本 QuadtreeCollision.ts , 新建一...
四叉树与引擎内置碰撞检测的结合运用,完整项目见文末。效果预览绿色为参加检测的对象(当前四叉树节点),红色为碰撞对象。如何使用引入脚本 QuadtreeCollision.ts , 新建一...
什么是四叉树? 如图,设想, 红框表示地图,星星表示单位,黄框表现范围, 要处理地图中范围内的单位,最直接的做法是筛选所有单位。 通过上图可以看到一个显而易见的问题,大部分单位都不需要被处理。 如果...
四叉树与引擎内置碰撞检测的结合运用。效果预览绿色为参加检测的对象(当前四叉树节点),红色为碰撞对象。image如何使用引入脚本 QuadtreeCollision.ts , 新建一个 QuadtreeCollision ,并初始化为世界坐标系下的...
【步兵 cocos2dx】四叉树碰撞算法 by EOS.四叉树碰撞网上例子不少,自己也观摩了一下,然后自己写了一个。 并不是想证明自己写的比别人好,不自己写一遍,总感觉自己不认识它。 写过之后感觉,深入了解,并且自己...
// 不满足四叉树条件,直接将网格提取结果加入到描述子和关键点序列中 descriptors.push_back(grid_descriptors); keypoints.insert(keypoints.end(), grid_keypoints.begin(), grid_keypoints.end()); } } } ...

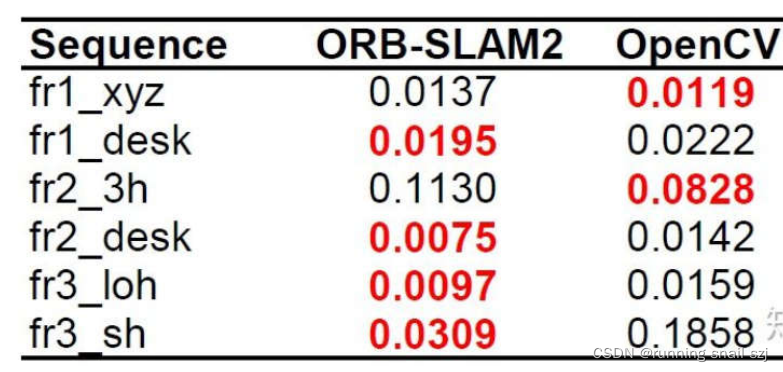
本文主要介绍了orb_slam2中特征点的提取,其原理和源码实现
ORB-SLAM2源码学习(一)
标签: slam
一、跟踪线程 参考关键帧跟踪:地图初始化成功那一帧是参考关键帧,直接使用上一帧 恒速模型跟踪:上一帧的位姿和速度相乘计算得到当前帧 重定位跟踪:跟踪丢失时使用, 局部地图跟踪:使跟踪更加准确 ...

该指针指向新创建的对象。是一个模板函数,它的作用是创建一个对象并返回一个指向该对象的。中指定),以及一个用于构造该类型对象的参数列表(在圆括号。这样做的好处是,你不需要手动管理这个。...
ORB-SLAM2源码特征点提取
标签: c++

ORB-SLAM2代码详解 ORB-SLAM2代码详解01_ORB-SLAM2代码运行流程 1 运行官方Demo 1.2. 阅读代码之前你应该知道的事情 1.2.1 变量命名规则 1.3 理解多线程 1.3.1 为什么要使用多线程? 1.3.2 多线程中的锁 ...
5.1图像分割概述 图像分割就是把图像分成若干个特定的、具有独特性质的区域并提出感兴趣目标的技术和过程。它是由图像处理到图像分析的关键步骤。现有的图像分割方法主要分以下几类:基于阈值的分割方法、基于区域...
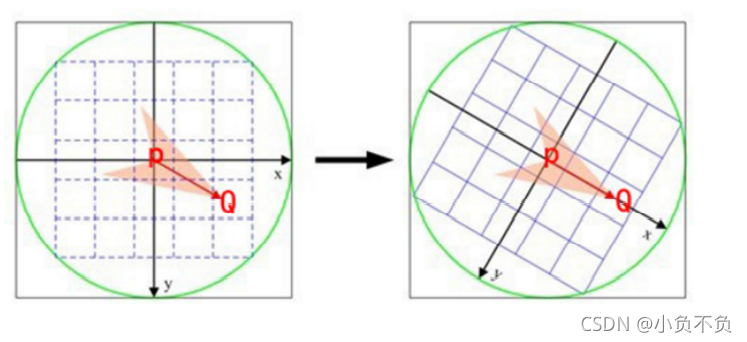
2、计算单应矩阵 2.1 原理 在得到了图像特征点以后,我们就可以根据这些特征点,实现图像匹配,即得到重叠区域。而要把多幅图像拼接成一幅图像,就需要以某幅图像为基准,把其他图像映射到该图像所在的平面。...
本篇主要关于ORB特征点提取。关键的原理部分分别是特征点的方向和描述子的计算,因此可以先看这一篇文章带入了解一下特征点提取原理。,为了方便理解,稍微调换了一下本来 ORBextractor.cc 中的一些函数的顺序。...


推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地